什么是 navsim-online?
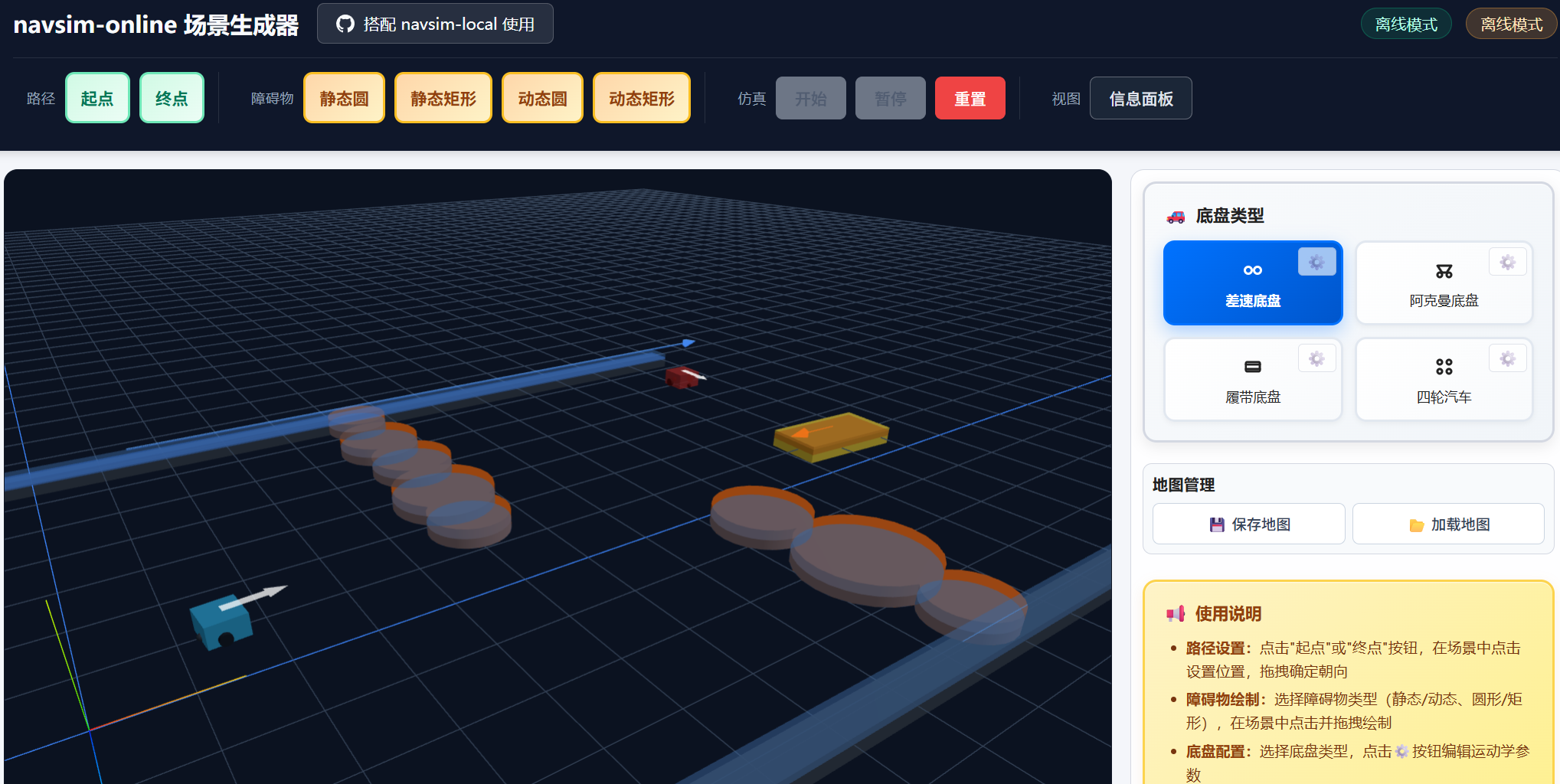
navsim-online 是一个机器人导航仿真场景生成工具,允许你在浏览器中直观地创建和编辑机器人导航场景。生成的场景文件可以与 navsim-local 导航仿真器配合使用,进行离线仿真和算法验证。
主要功能
1. 底盘类型选择
支持多种机器人底盘类型:
- 差速底盘:两个独立驱动轮,适合小型移动机器人
- 阿克曼底盘:前轮转向,后轮驱动,类似汽车结构
- 履带底盘:履带驱动,适合复杂地形
- 四轮汽车:四轮独立驱动或转向
注意:具体规划器插件不一定支持所有底盘类型,要根据规划器进行选择底盘类型。当前默认的规划器插件,只能使用差速底盘。
2. 路径规划
- 设置起点:点击"起点"按钮,在场景中点击放置起点,拖动确定机器人朝向
- 设置终点:点击"终点"按钮,在场景中点击放置终点,拖动确定目标朝向
3. 障碍物绘制
支持多种障碍物类型:
- 静态圆形障碍物:固定的圆形障碍物
- 静态矩形障碍物:固定的矩形障碍物
- 动态圆形障碍物:可移动的圆形障碍物
- 动态矩形障碍物:可移动的矩形障碍物
4. 地图管理
- 保存地图:将场景保存到本地文件或在线存储
- 加载地图:从本地文件或在线存储加载之前保存的场景
保存的离线地图是.json格式,可以在navsim-local中加载该地图进行规划仿真。
快速开始
步骤1:访问工具
打开浏览器,访问 GL Robotics 网站的导航仿真栏目。
步骤2:选择底盘类型
在左侧"底盘类型"面板中选择你需要的机器人底盘类型。
步骤3:设置起点和终点
- 点击工具栏中的"起点"按钮
- 在3D场景中点击放置起点位置
- 拖动鼠标确定机器人的初始朝向
- 重复步骤1-3设置终点
步骤4:绘制障碍物
- 点击工具栏中的障碍物按钮(静态圆、静态矩形、动态圆、动态矩形)
- 在场景中点击放置障碍物
- 对于矩形障碍物,拖动确定大小和朝向
在视图-->信息面板中,可以修改障碍物的参数,如大小、速度等。
步骤5:保存场景
- 点击"保存地图"按钮
- 输入地图名称
- 选择保存到本地文件或在线存储
使用技巧
视图控制
- 旋转视图:使用鼠标右键拖动旋转3D场景
- 缩放视图:使用鼠标滚轮缩放
- 平移视图:使用鼠标中键拖动平移
编辑场景
- 删除元素:在信息面板中找到要删除的元素,点击删除按钮
- 重置场景:点击"重置"按钮清空所有元素
导出和导入
- 导出为JSON:保存的地图文件为JSON格式,可用于版本控制
- 导入场景:点击"加载地图",选择之前保存的JSON文件
与 navsim-local 集成
生成的场景文件可以直接用于 navsim-local 导航仿真器:
- 在 navsim-online 中创建并保存场景
- 下载场景JSON文件
- 在 navsim-local 中加载该JSON文件
- 运行导航算法进行仿真
常见问题
Q: 如何修改底盘参数? A: 点击底盘类型卡片上的"编辑"按钮,可以修改轴距、轮宽、速度限制等参数。
Q: 支持多少个障碍物? A: 理论上支持无限数量的障碍物,但建议不超过100个以保持良好的性能。
Q: 如何分享场景? A: 保存场景后,可以下载JSON文件并通过邮件或云存储分享给他人。
下一步
- 学习如何在 navsim-local 中使用生成的场景
- 探索不同的规划器插件
- 参与社区讨论和分享你的场景
祝你使用愉快!
评论
加入讨论
登录或注册后即可发表评论,与其他学习者交流
0 条评论
加载评论中...