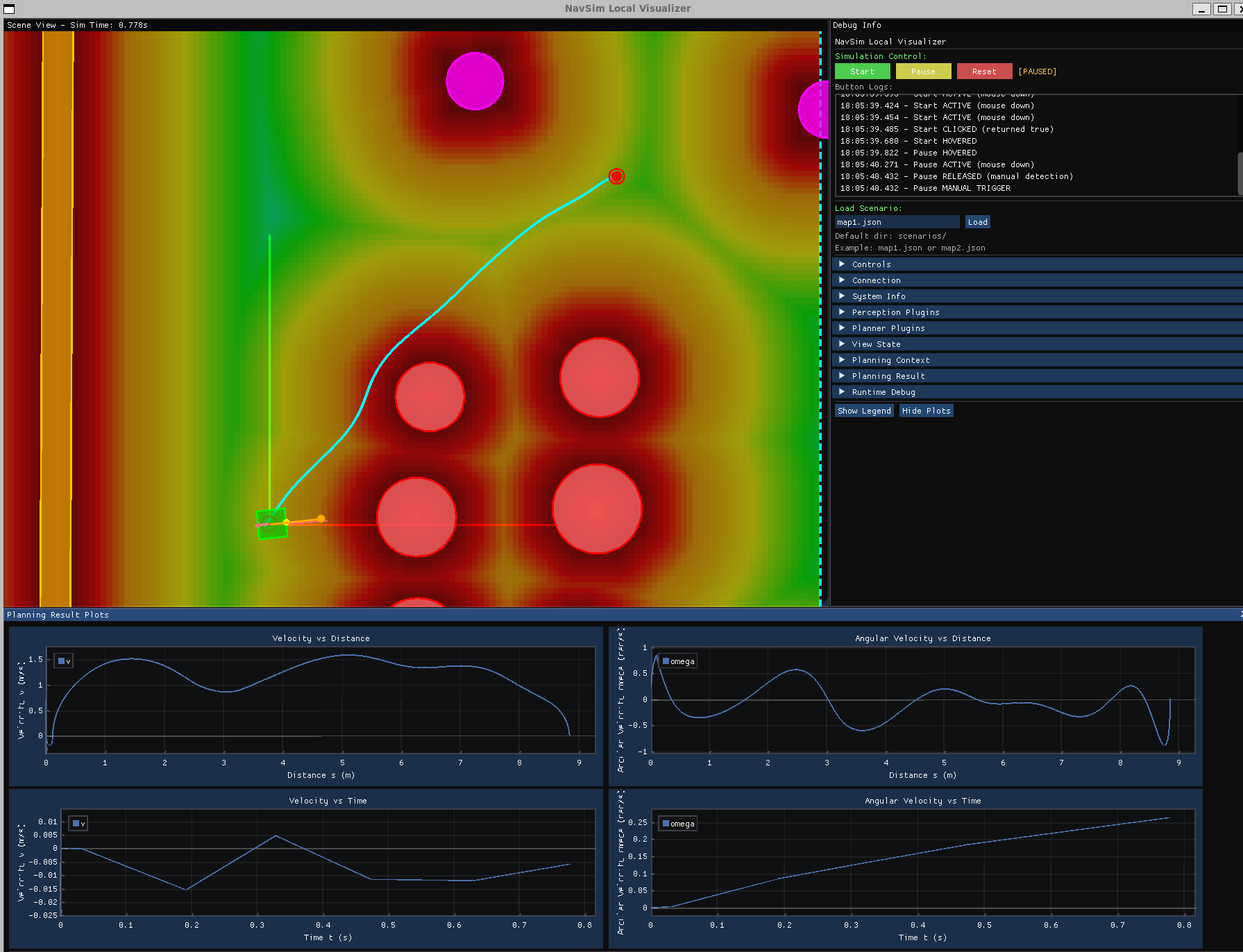
navsim-local项目是由c++编写的,在ubuntu上编译运行的机器人导航仿真器。它可以解析navsim-online生成的场景文件,加载场景中的起点、终点、障碍物等信息,并调用规划器插件生成路径,进行离线仿真验证。ImGui 控制台实时展示 BEV 障碍物、轨迹、仿真状态与性能统计。
目前提供两个规划器插件:
- ddr-opt(代码里叫jps planner)
- 拓扑驱动mpc
核心特性
- 规划器插件社区:计划移植或自制多个规划器插件,成为大家学习和交流的平台。后边会更新更多的规划器插件。会在公众号里写文章预告。
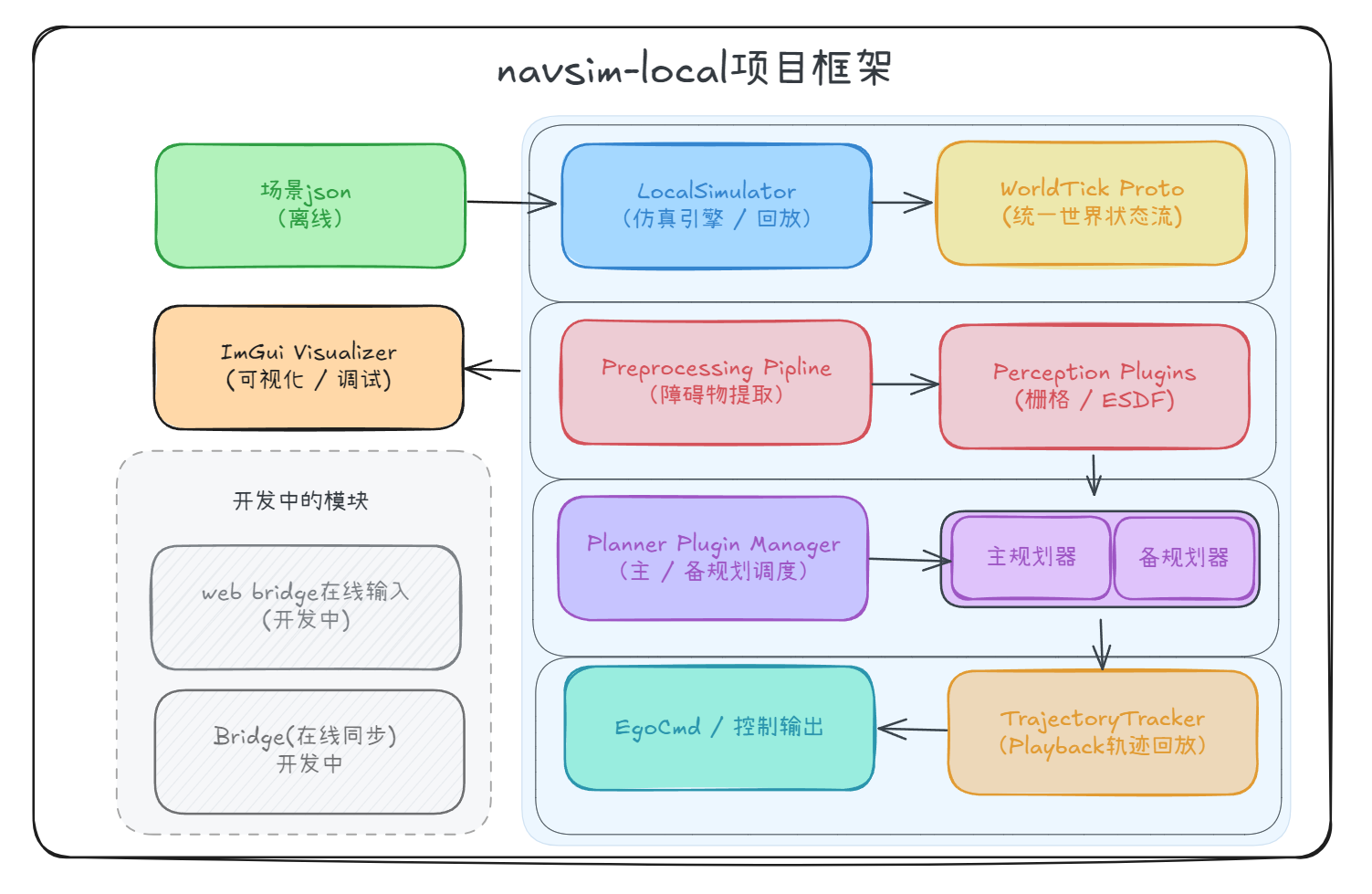
系统架构图
使用说明
1. 下载源码
git clone https://github.com/ahrs365/navsim-local.git
cd navsim-local
git submodule update --init --recursive # 若启用了子模块
mkdir -p third_party && cd third_party
git clone https://github.com/ocornut/imgui.git --depth 1
git clone https://github.com/epezent/implot.git --depth 1
2. 编译运行
-
build_and_run_debug.sh:单帧静态规划,默认使用esdf插件和jps插件(ddr-opt),
./build_and_run_debug.sh -
run_tmpc_test.sh:单帧静态规划,默认使用拓扑MPC规划插件(t-mpc),
./run_tmpc_test.sh -
build.sh:动态仿真脚本,使用时执行
./build.sh local
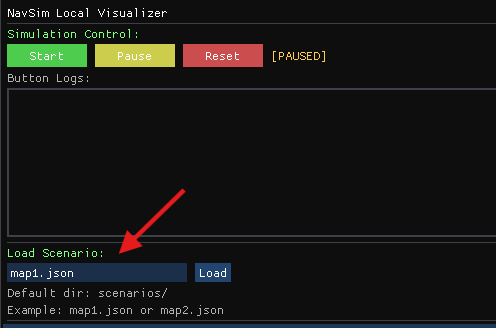
3. 加载场景文件
通过navsim-online生成的场景文件,可以加载到navsim-local中进行仿真。
需要把下载的离线场景文件,放置在navsim-local/scenarios目录下。
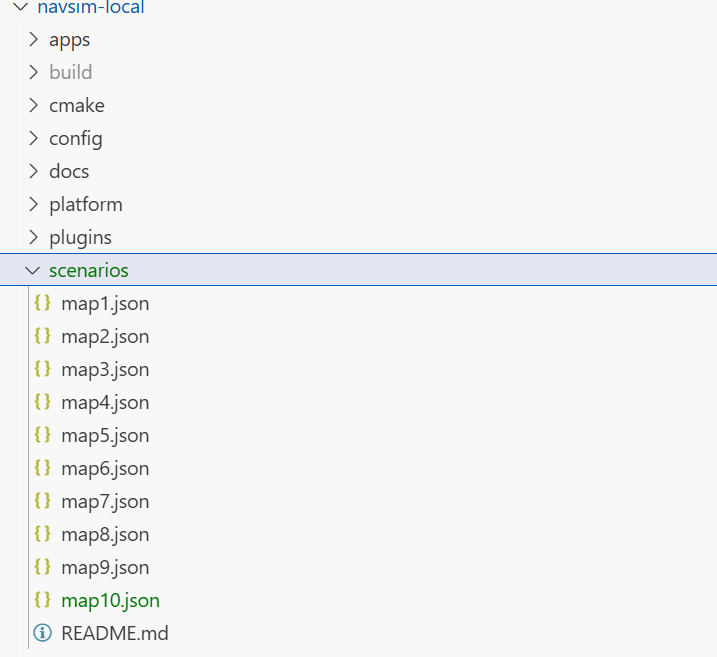
只需填写地图名称,然后点击load
4. 运行仿真
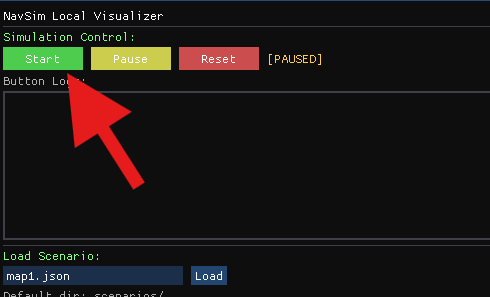
仿真介绍后,可以点击reset再次仿真
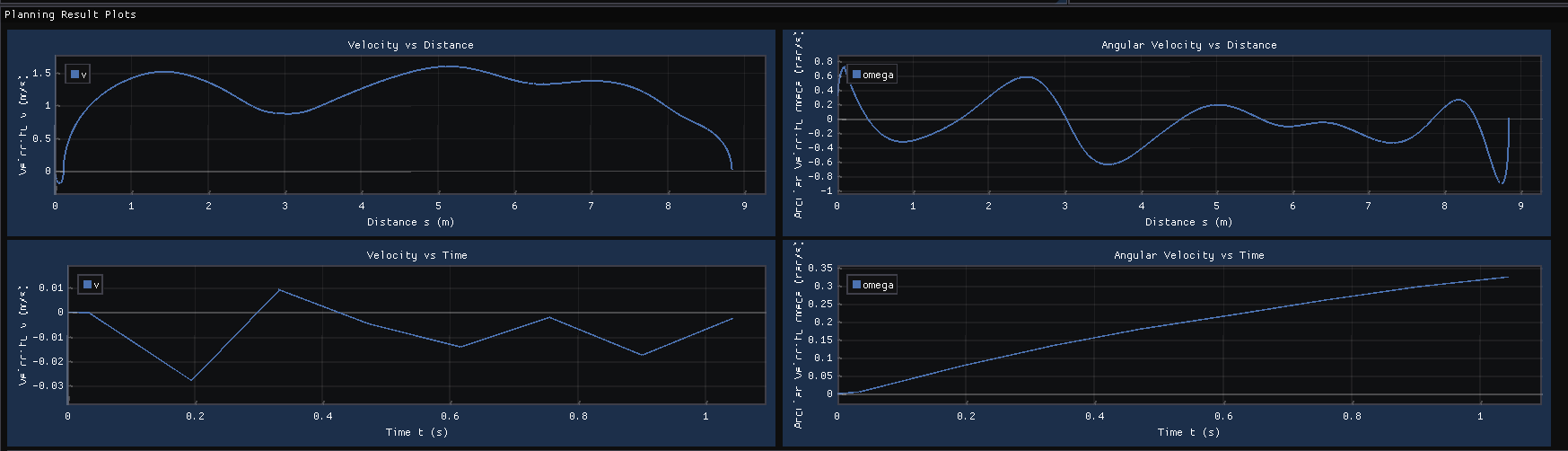
可以查看下方速度曲线,第一行的两个是整条轨迹的速度,第二行的两个是自车运行的速度。
5.其他操作
鼠标滑轮放大画面,右键按住拖动画面
评论
加入讨论
登录或注册后即可发表评论,与其他学习者交流
0 条评论
加载评论中...