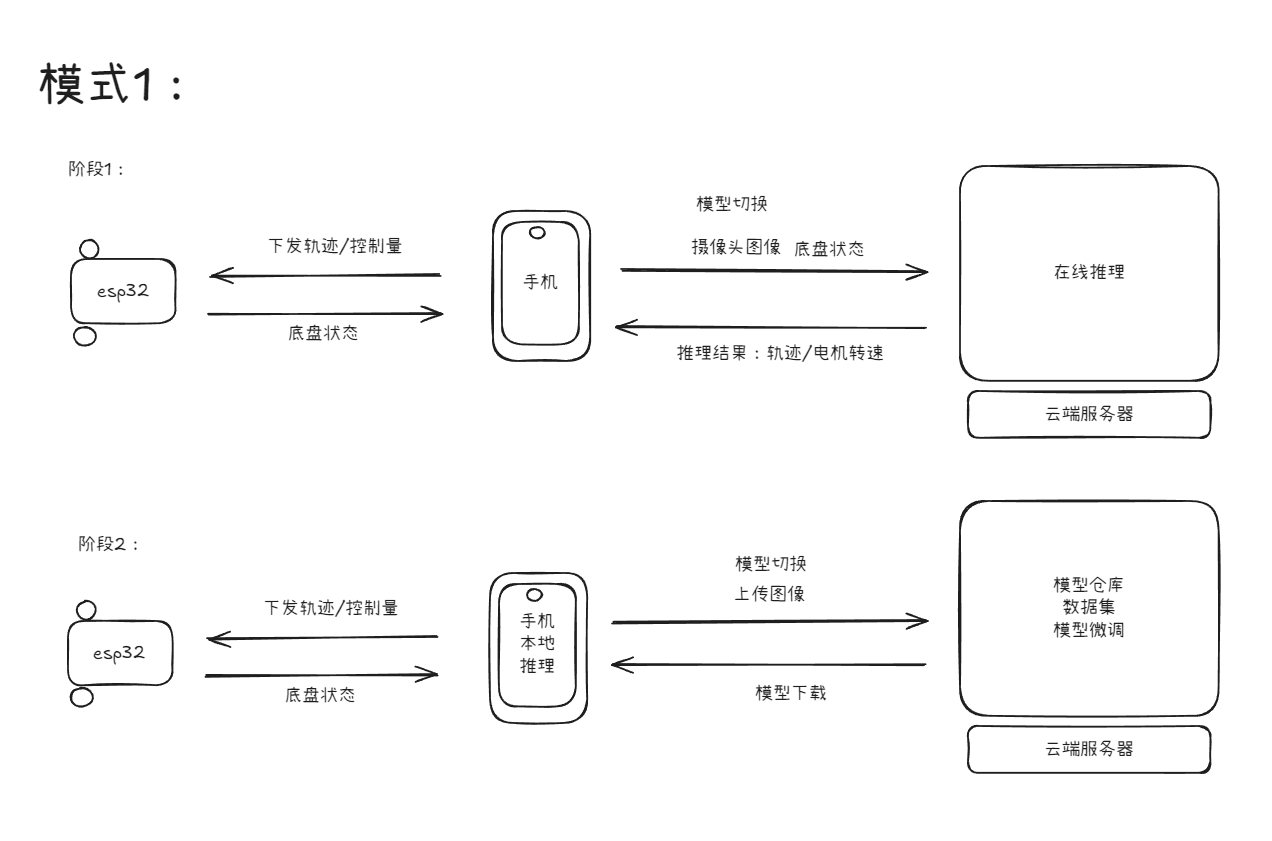
所用大模型为OmniVLA,这是一个基于OpenVLA-OFT改造的用于导航的VLA模型。整体架构设计如下(当前采用阶段1架构):
视频演示
超低成本手搓的小底盘,巴掌大小,直接看效果。
底盘硬件示意图
电机驱动模块:L298N
- L298N 用于控制两个 N20 电机 的正反转和转速。
- 输入引脚(IN1~IN4) 用于控制电机的转动方向。
- 使能引脚(ENA、ENB) 用于开启电机。
- 电源(VCC 和 GND) 为电机驱动模块提供电源。
- 电机:N20 带编码器电机
- N20 电机 带有编码器,编码器的 A/B 相信号 用于提供电机的转速反馈。
- 编码器引脚:A 和 B 相信号分别连接到 ESP32-C3 的 GPIO 3、GPIO 4(左电机) 和 GPIO 9、GPIO 10(右电机)。
- 主控板:ESP32-C3
- 控制 L298N 电机驱动模块 的 GPIO 引脚(5~8)。
- 读取来自 N20 编码电机 的 A/B 相信号,用于获取电机转速反馈。
- 使用 PWM 信号 来控制电机的速度。

预告
硬件架构解读和软件架构解读,敬请关注,即将到来
评论
加入讨论
登录或注册后即可发表评论,与其他学习者交流
0 条评论
加载评论中...