GL Robotics
首页
博客
教程
实践项目
Motion Planning Simulator
返回教程列表
多模态大模型导航
从零学习多模态大模型导航
5 篇教程
文章列表
1
0-OmniVLA概览
OmniVLA概览
9 分钟
阅读
2
1-Vision Backbone(双视觉编码器)详解
详解视觉编码器(Vision Backbone)的工作原理,包括 SigLIP 和 DINOV2 双编码器架构的设计思路与实现细节
7 分钟
阅读
3
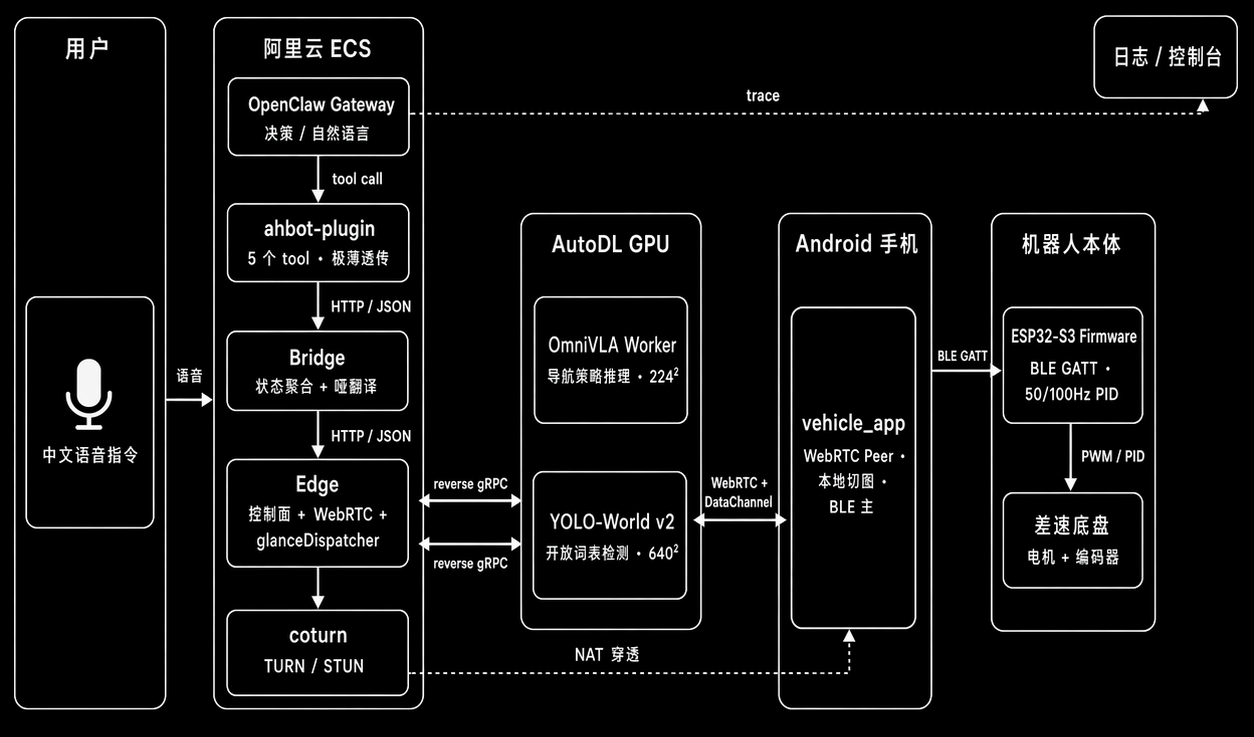
ahbot软硬件开源预告
一台 Android 手机 + ESP32 底盘 + AutoDL GPU,完整跑通"语音 → 视觉感知 → VLA 导航"端到端链路。视频里展示了 ahbot 当前 P1.5 阶段的实测效果
8 分钟
阅读
4
多模态大模型导航:第三阶段成果汇总
多模态大模型导航实践,手搓小底盘测试
2 分钟
阅读
5
多模态大模型导航:第二阶段成果汇总
多模态大模型导航第二阶段成果展示,包括目标图像导航、室外长距离GPS导航和语言导航的实现效果
1 分钟
阅读