与技术一起进化
机器人与自动驾驶领域日新月异,记录每一次学习与转型
精选专栏
章节目录
1.轨迹优化的表述和ilqr的引出
本篇是新开设的专栏《从零做一个时空联合规划器》的开篇。本文从最基本的概念出发,引出轨迹优化问题和DDP/iLQR,本文主要内容为:轨迹优化问题表述+10个相关问答。通过本文,可以对整个优化问题有一个宏观的了解。
AL-iLQR实践指南 1.如何对给定控制序列做前向仿真并计算代价
理解轨迹优化的基本组成,学习如何对给定控制序列做前向仿真并计算代价,掌握 AL-iLQR 的基础概念与项目骨架
AL-iLQR实践指南 2.理解 Bellman 递推和 Riccati 方程
深入理解 Bellman 递推和 Riccati 方程,实现从给定控制到求解最优控制的跨越,掌握有限时域 LQR 的核心原理
AL-iLQR实践指南 3.将 LQR 推广到非线性系统,实现带正则化和线搜索的稳定 iLQR
将 LQR 推广到非线性系统,实现带正则化和线搜索的稳定 iLQR 求解器,掌握无约束轨迹优化的完整实现
AL-iLQR实践指南 4:各种约束如何建模
目标:理解如何用统一接口描述各种约束,并封装为「带约束的最优控制问题」
AL-iLQR实践指南 5:增广拉格朗日与 AL-iLQR 求解器
目标:理解如何将约束「塞进」代价函数,并组装完整的双层循环求解器
AL-iLQR实践指南6:解析求导后求解耗时150ms降到9ms
将求导方式从数值差分,改进为解析求导后,al-ilqr求解耗时从150ms降低到9ms,提升惊人
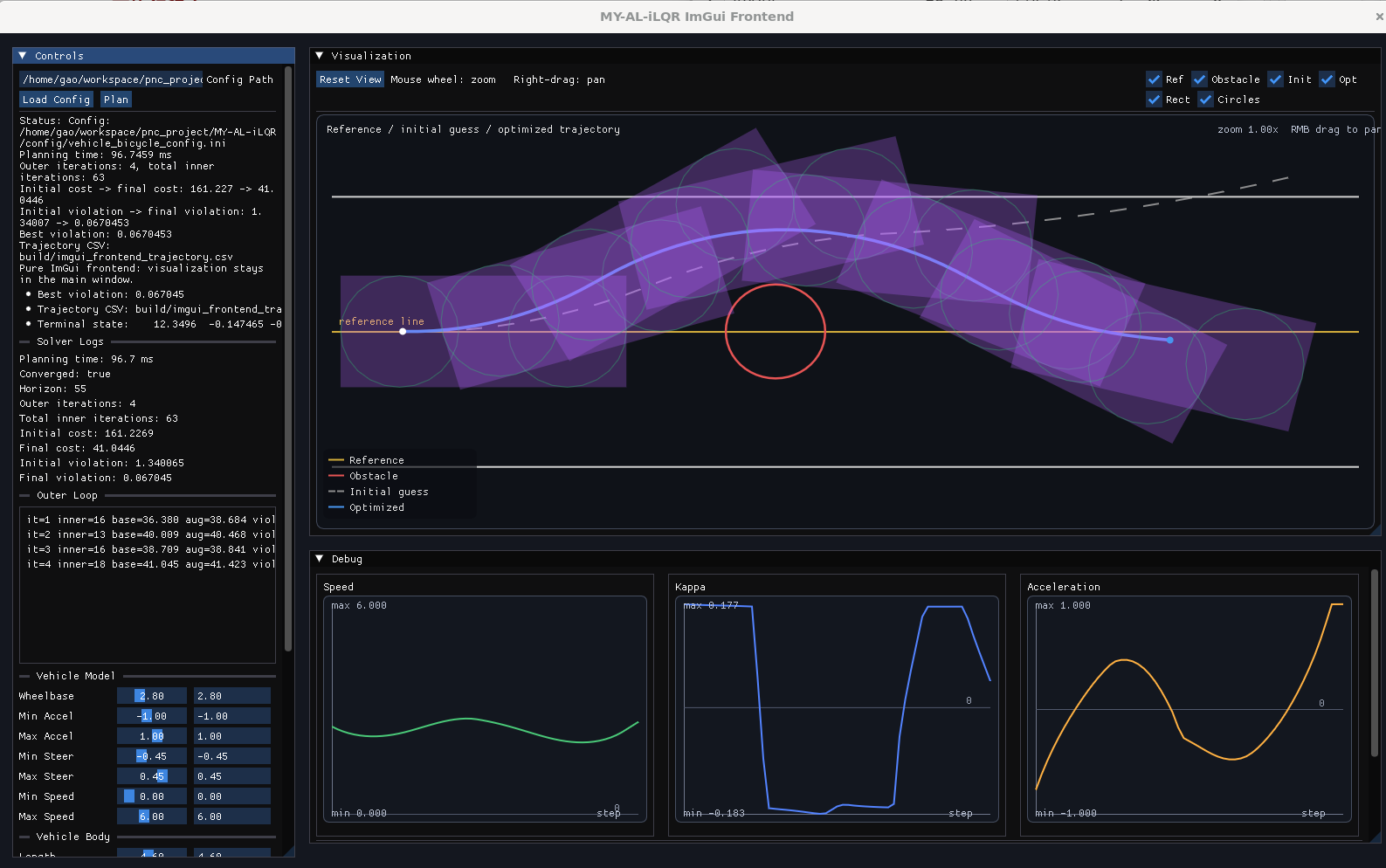
AL-iLQR实践指南7: 自车多圆拟合与碰撞约束
交互式学习多圆拟合自车建模、碰撞约束的数学推导、Jacobian 解析验证,以及增广拉格朗日如何把不等式约束融入 iLQR




最新博客
查看全部
OpenVLA和OmniVLA的一些对比
对比OpenVLA与OmniVLA的架构继承关系、模型结构差异与技术演进路线,从Llama-2基座到视觉-语言-动作多模态融合
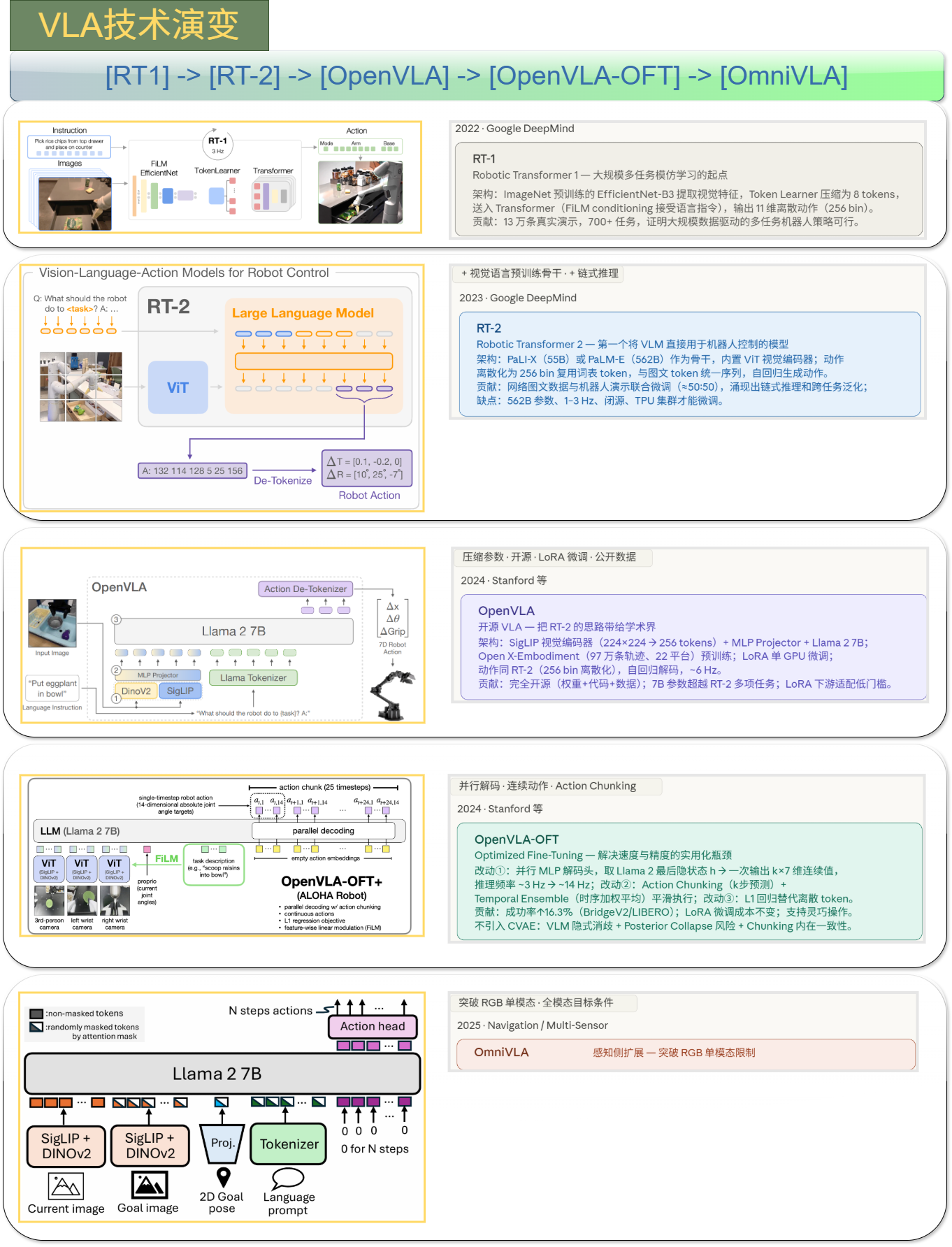
OpenVLA技术演变:从操作任务到多模态导航OmniVLA
深入解析 VLA 技术的演进路线:从 RT-1 到 OpenVLA 再到 OmniVLA,理解视觉-语言-动作模型如何从机械臂操作走向多模态导航
ALM+LBFGS=混合A星终结者?
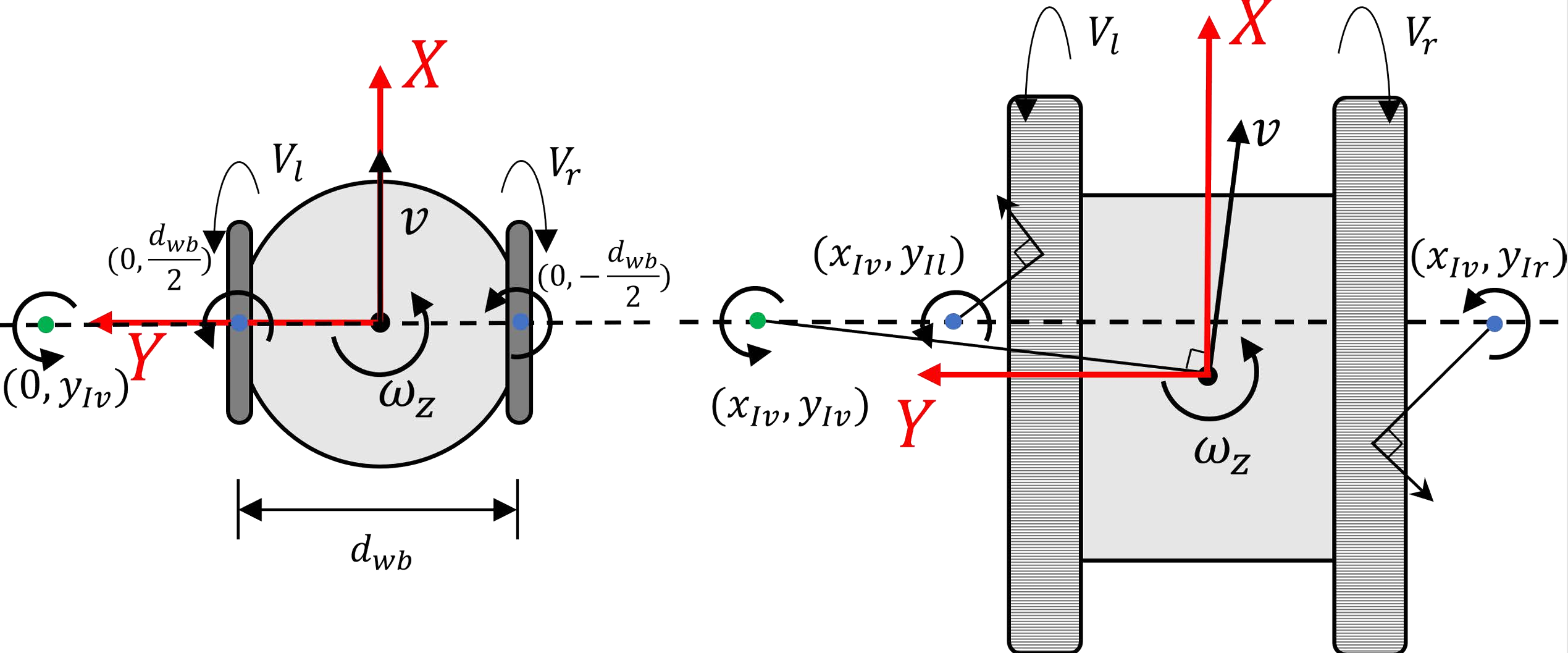
这篇论文提出了一个面向差速驱动机器人(包括轮式与履带式)的统一轨迹优化框架。作者基于瞬时旋转中心(ICR)建立通用运动学模型,并用运动状态表示法(在姿态与弧长空间构造多段多项式轨迹)使轨迹天然满足连续性和运动学约束。在约束处理上,论文创新性地结合了惩罚函数(处理速度、加速度、安全等不等式约束)与增广拉格朗日方法(仅处理终点位置等式约束),既保证了精度又提高了数值稳定性。